
Can you post some close up photos , or videos of the arms? It looks quite complicated. I’d like to see how they work. I want to add arms to Zoe, but I am still working on her GPS and Wheel Odometry.
Show And Tell (Your Builds)
iocane
#22
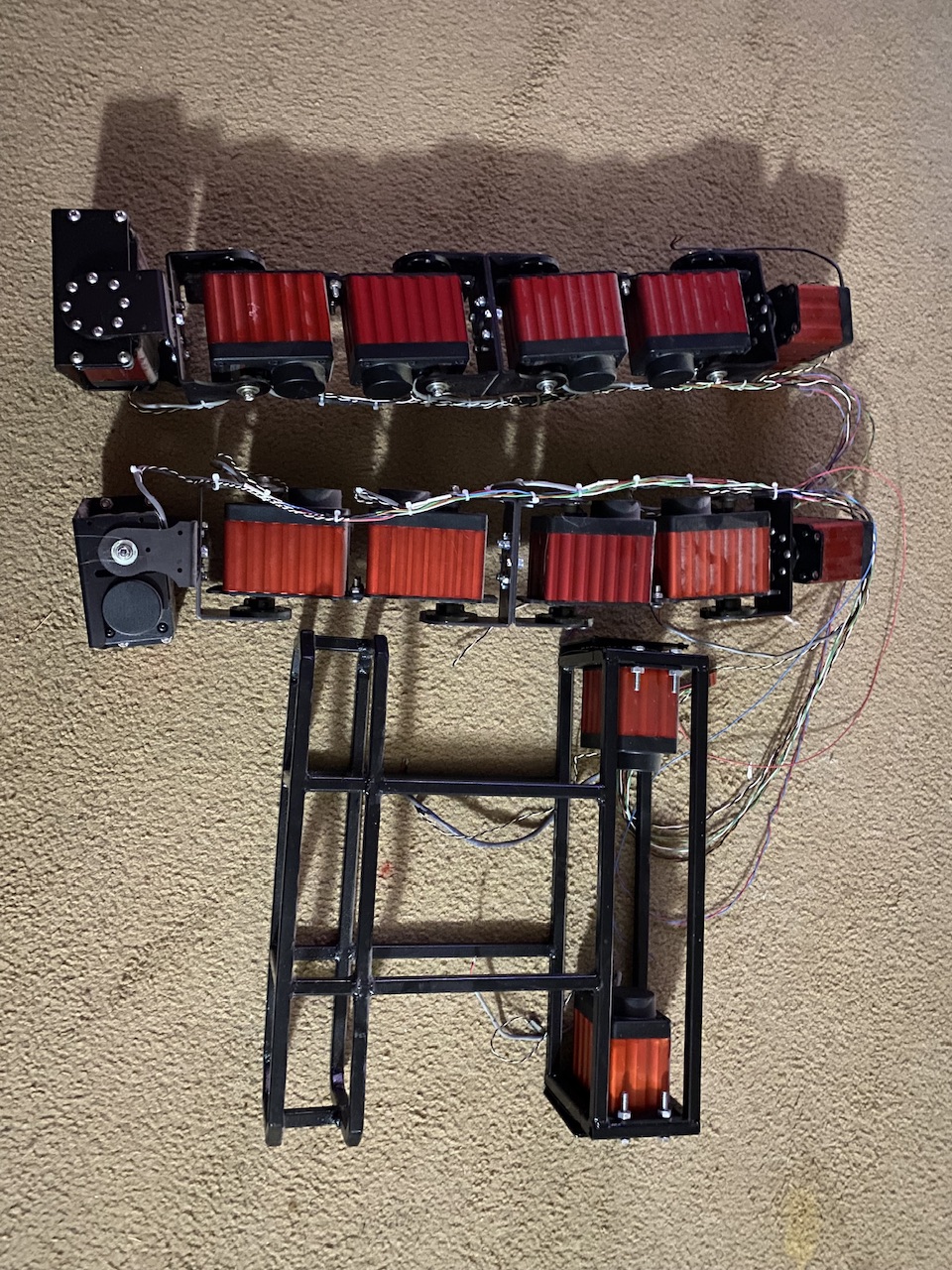
ABS was used a lot in its construction. I need to make changes to the shoulder to get a better range of movements. A number of motors still need to be added.

Rex
#23
What kind of actuators are those? pneumatic? electric ? Were they expensive? Where did you get them?
Rex
#25
Are you using some type of driver board to control them? What kind of processor/MPU/CPU are you controlling them with? do they have any type of feedback, ie ‘positional sensors’ built into them?
iocane
#26
Laptop controlling a arduino using 8 relay boards for the arms major movements. Separate arduinos for different parts of the robot. Relays can be used reverse voltage just takes multiple relays. The catch is another relay has to turn off the electricity otherwise for a very brief period of time short circuit. Potentiometer to find a joint angle used for positional control. The relays have a annoying delay that has to be accounted for in programming. I figure I will replace the relays with something better eventually or find ones without a delay. Motors for the wrist and servos for the hand have not been installed yet. The other arm just has enough parts put in so the robot doesn’t appear one armed. Mechanism for a simple claw hand on that side. There are linear actuators with built in positional control.
Rex
#29
So far, my robot contains two arduinos.
Also has two servo controllers and two Phidgets I/O boards, and a sabertooth motor driver.
iocane
#30
Nice robot, reminds me of star wars. The way it moves around it would fit right in if some Jedi or Storm troopers walked by. You have a lot of good stuff on your webpage. Still working on my robot. 3d printing gears and making gearboxes. Works but slow.
Rex
#31
I wanted to be able to give verbal commands , and talk to my robot, so I developed a custom built chat-bot for Zoe. My robot can be seen at www.ZoeTheRobot.NET
Chat bot success & Fail

Rex
#33

Zoe’s web site shows information about how she was built as well as materials sources.
This project consists of both hardware robotics, and software development.
Rex
#34
I’m still working on Zoe The Robot. I am trying to make at least one YOU TUBE video per month. Zoe The Robot Latest Video.
myblack60impala
#35
This was my failed project Frits. It was a child sized autonomous humanoid robot. The brackets weren’t strong enough to support himself. Each servo has a peak value of lifting 200lbs and a continuous rating of 100lbs on the servo horn.

myblack60impala
#36
Originally I had planned to make this into a navigation robot. But it’s so ridiculously overpowered I couldn’t let that free on crappy AI coding. So I went with it being a remote controlled wheelchair that I occasionally use to haul stuff around. Its actually great as a RC wheelbarrow of sorts. It easily can haul 500lbs and zero point turns at any speed. I can’t post it in the remote controlled topic as forum rules won’t let my make 3 consecutive posts.

Rex
#37
Some of the videos here list STLRobot.Com or ZoeTheRobot.Com but these are no longer valid. THE OFFICIAL WEB SITE IS ZoeTheRobot.NET. here is another video… https://youtu.be/SeXxdBV8EsY
Rex
#39
I recently saw a video where a construction worker had a wheel chair base, and he added a “dumpable wheel barrow bucket” on top. When he dug a hole at a work site, he would shovel the dirt into the bucket, and the robot wheel chair base would haul it over to the dirt’s new destination.
Rex
#40